















ヘディングセンサー有無による動作の違い
アイパイロットユニットを使用するなら、ヘディングセンサーもあった方が良さそうなのはわかるけど、実際にどんな風に動きが変わるの?といった疑問について解説するページです。
1.スポットロック使用時の動作の違い
◆ヘディングセンサー有りのスポットロック

ジョグ機能が使用可能となります。
ヘディングセンサーと同期された状態ですと、イラスト中のリモコン液晶の様に、錨マークの四方に▲が表示され、ジョグ機能がスタンバイになっている事がわかります。
リモコンの+−左右ボタンを使用し、ボートの現在向いているキール方向を相対的に前後とし、前後左右へ約1.5mの自動位置調整が可能となります。近年のシビアなピンポイントの釣りに抜群の効果を発揮します。
動作詳細としては、プロップ回転が増減し、ステアリングも左右へ操舵しながら、約1.5m移動し、再度最初と同じ方角を向いてからスポットロックを再開します。
◆ヘディングセンサー無しのスポットロック

ジョグ機能のスタンバイを示す▲印が表示されません。
前後左右へ位置調整したい場合は、リモコン操作又はエンジンで移動しなければなりません。風やエンジンの行き足で、実際には、意図した方位、意図した位置や距離とは大きく狂ってしまいます。
2.オートパイロット使用時の動作の違い
◆ヘディングセンサー有りのオートパイロット
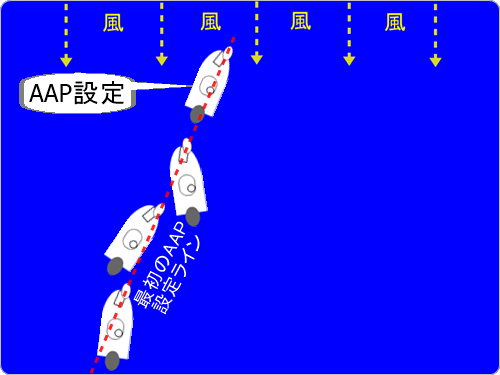
イラストは【流され釣り】の例となります。
オートパイロット〔AAP設定〕時のトレースライン(赤点線)を正確にアイパイロットユニットがトレースしております。これは、GPS魚探の航跡記録をOnにしておくと、イラストの様に綺麗な直線軌道を確認可能です。
◆ヘディングセンサー無しのオートパイロット
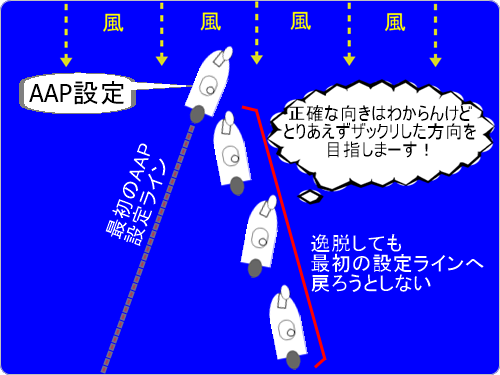
イラストはわかり易い様に、極短時間で設定ラインを逸脱しておりますが、実際にはここまで短時間では逸脱しません。その度合いは、風、潮などの影響で変わります。
ヘディングセンサー無しの場合、方位を認識していない為、最初に設定したトレースラインから逸れた場合でも、そのまま【曖昧なAAP】を継続します。
3.備考
ヘディングセンサーはBLUETOOTHモデルに搭載可能となっております。オプション追加する場合は、BLUETOOTHのペアリングのみでご使用可能です。
| ヘディングセンサー | |
| POWER DRIVE/IP/BT シリーズ |
オプション
追加可
|
| TERROVA/IP/BT シリーズ | 標準装備 |
| ULTERRA/IP/BT シリーズ | 標準装備 |
いかがでしたでしょうか?
・新規で本体導入検討されている方
・BLUETOOTH型のPOWER DRIVEを既にお使いの方で追加検討中の方
・既に使用しているけど良く効果がわかっていなかった方
ヘディングセンサーの役割と、有無による動作の違いを理解出来たでしょうか?
ミンコタに関する情報をSNS配信しております。
Instagramオフィシャルアカウント
facebookオフィシャルアカウント
Twitterオフィシャルアカウント
YouTubeオフィシャルアカウント
〔 EASTLAND MARINE別館トップへ戻る 〕
・新規で本体導入検討されている方
・BLUETOOTH型のPOWER DRIVEを既にお使いの方で追加検討中の方
・既に使用しているけど良く効果がわかっていなかった方
ヘディングセンサーの役割と、有無による動作の違いを理解出来たでしょうか?
ミンコタに関する情報をSNS配信しております。
Instagramオフィシャルアカウント
facebookオフィシャルアカウント
Twitterオフィシャルアカウント
YouTubeオフィシャルアカウント
〔 EASTLAND MARINE別館トップへ戻る 〕